番号は実際のポートに書いてあるほか、 Googleで検索 すればたくさん見付かります。
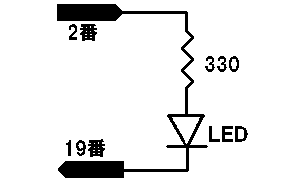
ポートとの接続方法ですが、この程度なら直接抵抗やLEDの足をポートに挿してしまえばいいと思います。 なお、LED程度の負荷であれば、外部電源は必要ありませんが、ショートはさせないように気をつけて下さい。 (電流は15mAまでです。これ以上流すとポートが燃える可能性があります)
| Top -> LinuxでI/O制御 | kei@sodan |
#include <linux/types.h> #include <linux/config.h> #include <asm/system.h> #include <asm/io.h> #define OUT_PORT 0x378 /* 出力ポート。0xは16進数を示す */ int main(void){ int i; ioperm(OUT_PORT, 8, 1); /* 初期化(ポートをいじるという宣言) */ for(i = 0; i < 5; i++){ outb(0x00, OUT_PORT); /* 2-9番の全部のピンにLを出力 */ sleep(1); outb(0xff, OUT_PORT); /* 2-9番の全部のピンにHを出力 */ sleep(1); } return 0; }コンパイル後、rootで実行して下さい。(一般ユーザだとSegmentation Faultが起こります) 1秒おきにLEDが点滅すれば成功です。
outb(数字, ポート番号);一度出力された値は、別の数値を出力しない限りそのままです。 通常出力は一瞬で終わるので、変化するパターンを出力させる場合は適当にsleepさせて下さい。
#include <stdio.h>
#include <linux/types.h>
#include <linux/config.h>
#include <asm/system.h>
#include <asm/io.h>
#define IN_PORT 0x379 /* 入力ポート。先程の出力ポート+1 */
int main(void){
int i;
char c;
ioperm(IN_PORT, 8, 1); /* 初期化 */
c = outb(IN_PORT); /* 2-9番の全部のピンにLを出力 */
printf("in : %d\n", c);
return 0;
}
先程と同様、rootで実行します。
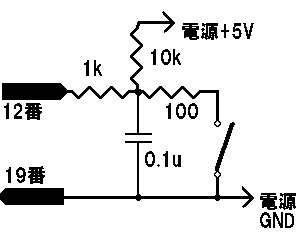
スイッチの状態を変えて、プログラムを実行してみて下さい。
出力される数値が変われば成功です。
c = inb(ポート番号);ポート番号は先程のもの+1です。得られるのは0x00-0xffの数値でが、入力ピンとの対応は以下のようになっています。
| ピン番号 | ビット(0から) | ピンの名前 |
| 10 | 6 | ACK |
| 11 | 7 | BUSY |
| 12 | 5 | PE |
| 13 | 4 | SLCT |
| 15 | 3 | ERR |
/* module prototype */ #define MODULE #define __KERNEL__ #include <linux/module.h> #include <linux/kernel.h> #include <linux/sched.h> #include <linux/fs.h> #include <linux/string.h> #include <asm/uaccess.h> #define DEV_MAJOR 60 /* * このあたりでIO関連のヘッダもincludeしておく */ /* * オリジナルのsleep関数。 * モジュール内ではsleep()かは使えないが、 * カーネル内の関数が直接使える。 */ void my_sleep(void){ schedule_timeout(1000 * 1000); } static char *devname = "mylp0"; static char inbit, outbit; MODULE_PARM(DEV_MAJOR, "i"); MODULE_PARM(devname, "s"); /* open関数。名前は好きに決めてよい */ static int mylp0_open(struct inode *inode, struct file *file){ /* * open時にしたいことを書く * 例えばさっきのioperm(ポートの初期化)とか ioperm(OUT_PORT, 8, 1); */ MOD_INC_USE_COUNT; return 0; } /* close関数 */ static int mylp0_close(struct inode *inode, struct file *file){ /* * close時にしたいことを書く */ MOD_DEC_USE_COUNT; return 0; } /* write関数 */ static int mylp0_write(struct file *file, const char *buff, size_t count, loff_t *pos){ /* * buff[]にwriteされたデータが入っているので、 * これを用いてやりたいことをする * 例えば、buff[0]を送信 outb(buff[0], OUT_PORT); */ return 0; } /* read関数 */ static int mylp0_read(struct file *file, char *buff, size_t count, loff_t *pos){ /* * readさせたいデータを用意して、最後のcopy_to_user関数で * 呼び出し元のメモリ(buff)に渡す * もちろん、ポートから読んだデータを送ってもよい。 */ static ca = "Hello, i'm driver."; /* 19は送信バイト数 */ copy_to_user(buff, ca, 19); /* 送信したバイト数を返す */ return 19; } /* * これは、ドライバの情報を持つ構造体。 * 右側がメンバ名。 * ここに関数を登録することで、そのデバイスをreadやwriteした時の動作が決まる * 対応する関数が無い時はNULLを入れておく * * 関数へのポインタがちょっと見にくいけど、やる事は簡単。 * 例えば、loff_t (*llseek) (struct file *, loff_t, int);ってのは * llseekっていうメンバは、(struct file *, loff_t, int)を引数に取って * loft_tを返す関数が入ってるんだな、て風に読む。 */ static struct file_operations mylp0_fops = { NULL, // struct module *owner; NULL, // loff_t (*llseek) (struct file *, loff_t, int); mylp0_read, // ssize_t (*read) (struct file *, char *, size_t, loff_t *); mylp0_write, // ssize_t (*write)(struct file *, const char *, size_t, loff_t *); NULL, // int (*readdir) (struct file *, void *, filldir_t); NULL, // unsigned int (*poll) (struct file *, struct poll_table_struct *); NULL, // int (*ioctl) (struct inode *, struct file *, unsigned int, unsigned long); NULL, // int (*mmap) (struct file *, struct vm_area_struct *); mylp0_open, // int (*open) (struct inode *, struct file *); NULL, // int (*flush) (struct file *); mylp0_close, // int (*release) (struct inode *, struct file *); NULL, // int (*fsync) (struct file *, struct dentry *, int datasync); NULL, // int (*fasync) (int, struct file *, int); NULL, // int (*lock) (struct file *, int, struct file_lock *); NULL, // ssize_t (*readv) (struct file *, const struct iovec *, unsigned long, loff_t *); NULL, // ssize_t (*writev) (struct file *, const struct iovec *, unsigned long, loff_t *); NULL, // ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int); NULL // unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long); }; /* * デバイスの初期化関数 * これは名前を変えてはいけない */ int init_module(void){ /* 先程の構造体と、名前と、デバイス番号を登録 */ register_chrdev(DEV_MAJOR, devname, &mylp0_fops); return 0; } /* * デバイスの開放時に呼ばれる関数> * これは名前を変えてはいけない */ void cleanup_module(void){ unregister_chrdev(DEV_MAJOR,devname); };要はいろんな関数を記述して、それを構造体に入れ、それをさらに init_module()のregister_chrdev()で登録することでデバイスが動くようになります。 この構造体の定義などはカーネルのバージョンによって頻繁に変わっているようです。 とはいっても大規模な変更はあまり無いと思います。 コンパイルがうまくいかない時は、/usr/include/linuxあたりのヘッダで定義を確認してみて下さい。
$ gcc -c mylp0.c -Wall -Wstrict-prototypes -O -pipe -march=i486 # mknod /dev/mylp0 c 60 0 # chmod 755 /dev/mylp0 # insmod mylp0です。コンパイルして、デバイスファイルを作って、パーミッション変えて 登録します。 60というのはデバイス番号で、もし使われているようなら別の数字を入れて下さい。
# rmmod mylp0なお、デバイスファイルは再起動してもそのまま残っています。これはrmで消せます。
...
int fd;
char str[100];
/* /dev/mylp0を読み書き可でオープン */
fd = open("/dev/mylp0", O_RDWR);
read(fd, str, 100);
close(fd);
...
write()も同様です。